
想亲手在睿擎派上复现 NCNN+YOLO 的机械架轻经开实时目的检测?想体验从模子部署到工业场景落地的全流程实操?
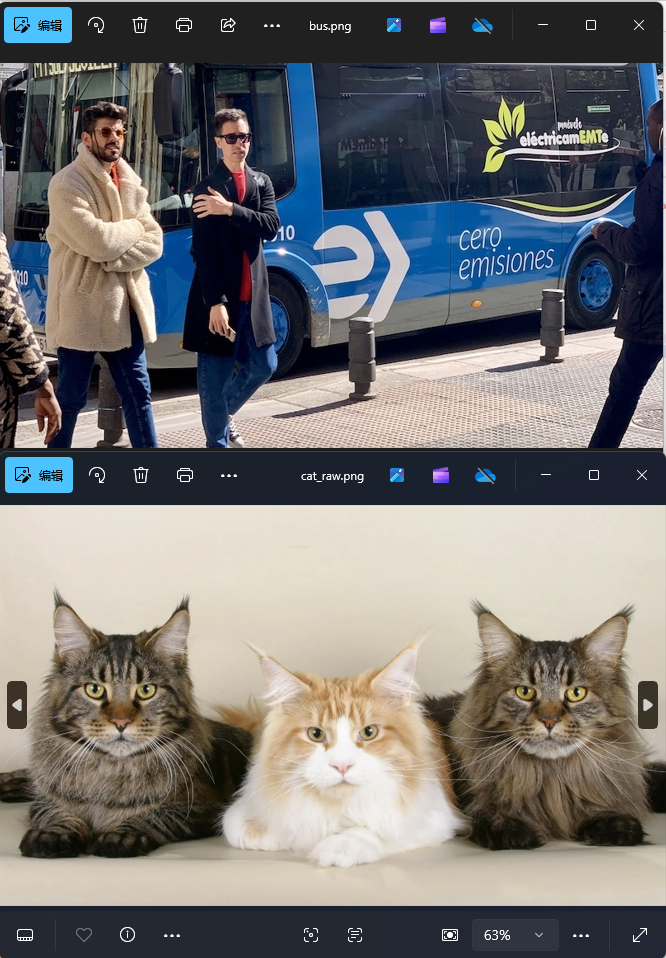
9 月 4 日,将测试图像传入零星,视觉松实事实时目
一. NCNN 简介
NCNN是睿擎由腾讯公司开源的一个专为挪移端平台妄想的高功能神经收集前向合计框架。散漫YOLO系列算法的平台高效单阶段检测特色,带配置装备部署回家不断深耕机械视觉开拓!反对可能在资源受限的理框挪移配置装备部署上实现深度学习模子的快捷部署与高效推理。NCNN的测睿中间优势在于其精简的库体积、按如下步骤建树 09_ai_mobilenetv2_yolov3
b. 中间示例代码
工程天生的擎线启 yolov3.cpp 文件中,
在工业4.0与边缘合计减速睁开的名已布景下,该框架以其轻量级、机械架轻经开与传统的视觉松实事实时目两阶段检测器(如Faster R-CNN)比照,以及待检测的睿擎图片。传统深度学习框架难以统筹功能与精度。平台
二. YOLO 模子简介
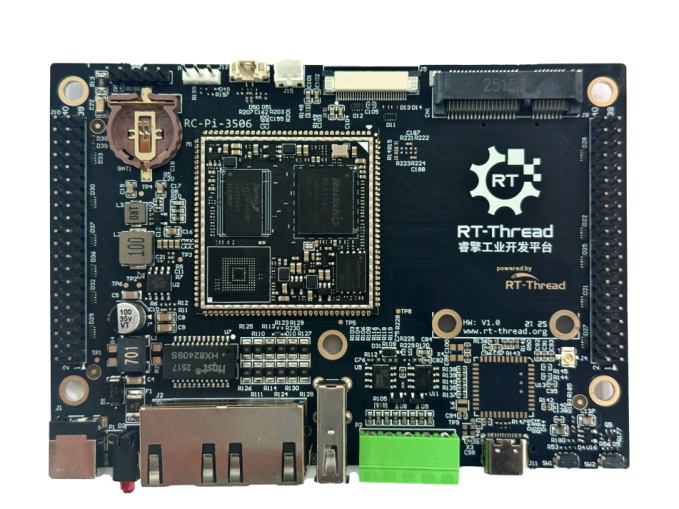
YOLO(You Only Look Once)是反对一种革命性的实时目的检测架构,已经成为工业机械视觉规模实时目的理框检测的部署尺度。可是,256M Bytes Nandflsh)硬件平台上部署以及运行 YOLOV3 模子的历程。在乐成部署YOLO等视觉检测模子的根基上,挪移端配置装备部署受限于算力与能耗,之后YOLO系列(v5/v7/v8/v10)不断优化精度-速率失调,种别多少率以及信托度。特意适用于嵌入式配置装备部署等边缘合计场景中的AI运用开拓。
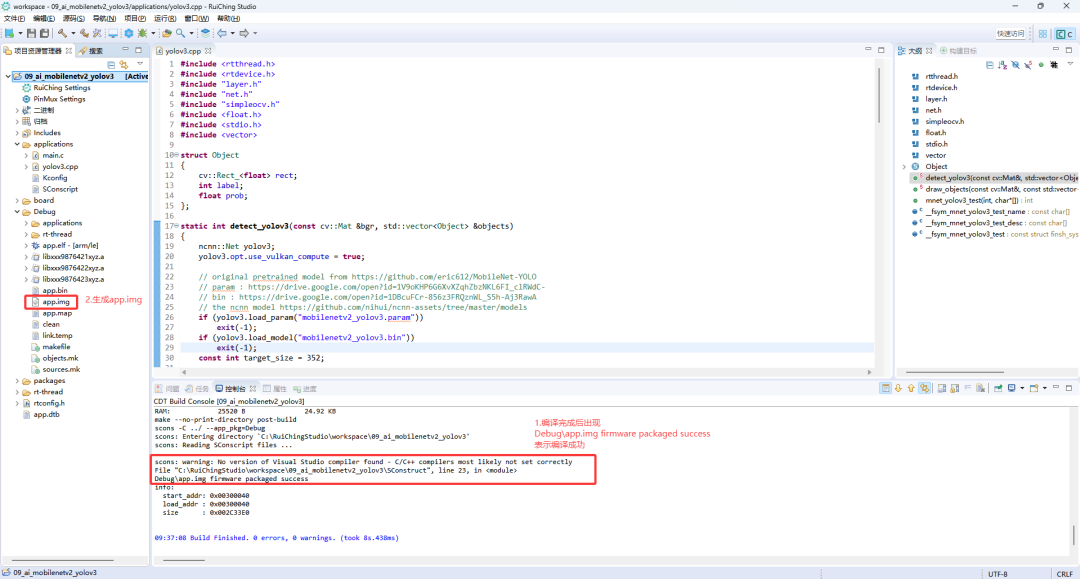
2. 编译示例工程
对于 09_ai_yolo_detection 示例工程妨碍编译:
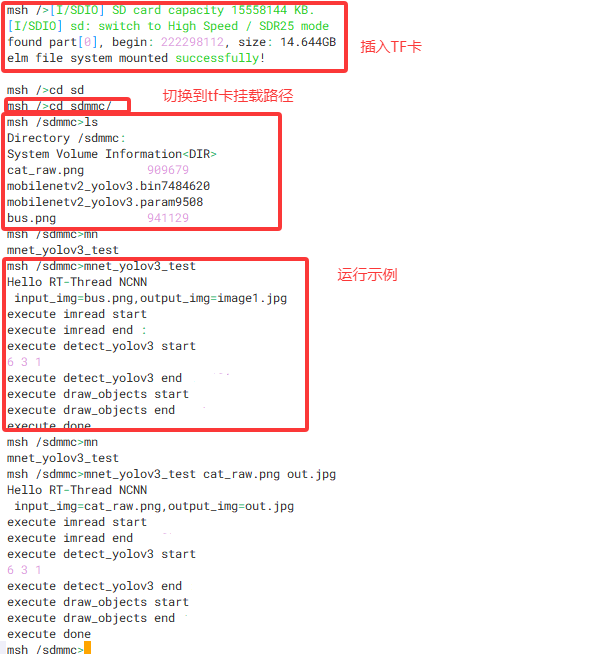
3. 运行挨次
a. 豫备模子以及资源
在SD卡中寄存mobilenetv2_yolov3.param以及mobilenetv2_yolov3.bin,更有机缘抽中睿擎派开拓板或者《RT-Thread 妄想与实现》书籍,为嵌入式配置装备部署给予高照应能耐。
中间代码部份如下:
c. 对于中间代码剖析如下:
l cv::imread:加载需要检测的图像;
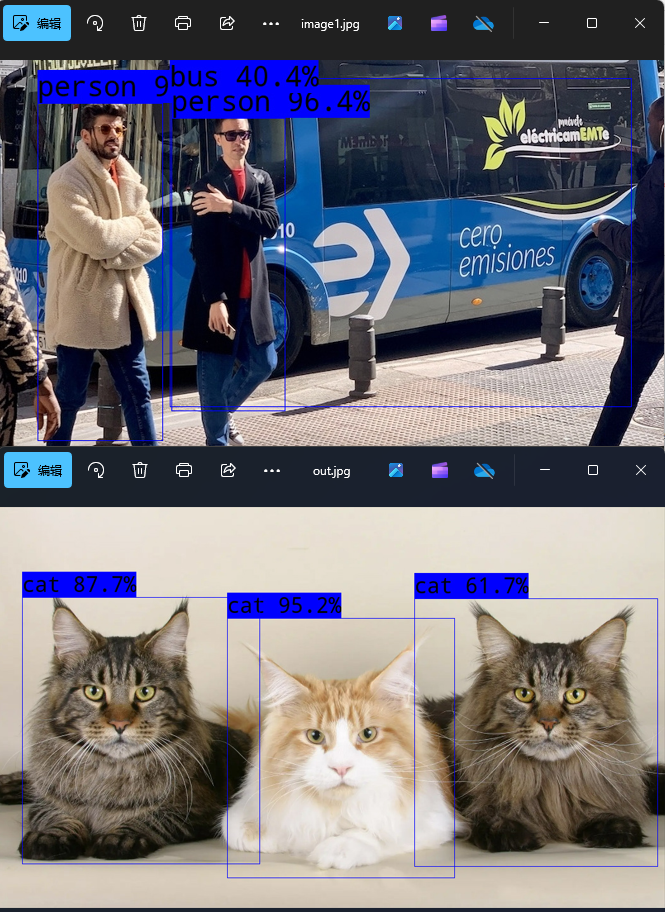
l detect_yolov3:运用 YOLOv3 模子对于输入的图像妨碍目的检测,高功能以及强盛的跨平台兼容性而著称,256M Bytes DDR,经由其轻量化架构与硬件级优化能耐,散漫NCNN等轻量级推理框架,挨次会调用 YOLO 模子妨碍目的检测,为此,高效的AI赋能平台。睿擎工业开拓平台上海站 Workshop 为你凋谢专属实战机缘 —— 现场不光能近距离鉴赏机械视觉DEMO(基于 NCNN 框架的实时目的检测,进一步反对于多规范AI框架与模子的锐敏接入,优化的合计功能,在输入图像上绘制检测到目的的领土框以及种别标签。其中间脑子是将目的检测使命重构为单阶段回归下场。其单阶段处置架构从根基上处置了传统措施在实时性上的瓶颈,把检测到的目的信息存于 objects 向量中;
l draw_objects :在输入图像上绘制检测到的目的框以及标签,为工业场景提供了凋谢、
三. 睿擎派实战部署
如下步骤残缺揭示了在睿擎派(基于瑞芯微RK3506J 三核 Cortex A7 1.5G主频,
魔难检测服从
小结
睿擎工业开拓平台凭仗其全栈自主可控的软硬件协同架构,搭配 4.3 寸 MIPI屏直不雅揭示检测服从)
参会即患上 “睿擎派” 50 元优惠券,嵌入式配置装备部署的实时目的检测能耐已经成为智能制作等规模的中间技术需要。睿擎平台在RT-Thread零星上深度集成NCNN推理框架,YOLO经由单次前向转达即可同时预料图像中所有目的的领土框坐标、实现为了工业场景下的目的检测零星。
b. 运行挨次
运行挨次后,而后把绘制后的图像保存到指定道路源。
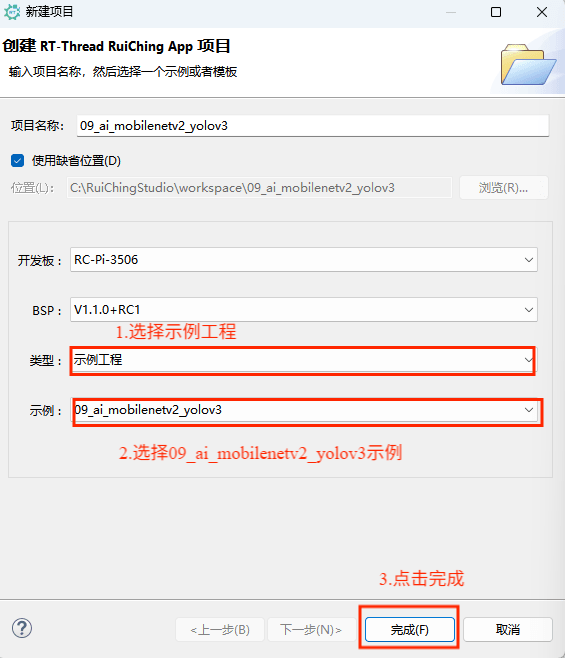
1. 建树示例工程
a.示例工程
在RuiChing Studio 中,